授業連動データのダウンロード
授業連動データ(Arduino〜Max)2018.1.24

授業連動データ(Arduino〜Max)2018.1.24
「Arduino+ECM」の回路をそのまま利用する。
シリアル通信を利用して、ArduinoのセンサーデータをMaxへ送信し、グラフ表示を行う。
空のスケッチを作成して、以下のコードをコピー&ペースト後、スケッチを保存する。
// ECM、加速度、CdsをMaxで視覚化(Arduino側)
// 2018.1 nakayasu
int sensorValue[5];
int outputValue[5];
void setup()
{
for(int k=0; k < 5; k++){
sensorValue[k] = 0;
outputValue[k] = 0;
}
Serial.begin(9600);
}
void loop()
{
sensorValue[0] = analogRead(0); //ECM
delay(10);
sensorValue[1] = analogRead(1); //A1ピン入力 - Z(KXM52-1050の8pin)
delay(10);
sensorValue[2] = analogRead(2); //A2ピン入力 - Y(KXM52-1050の7pin)
delay(10);
sensorValue[3] = analogRead(3); //A3ピン入力 - X(KXM52-1050の6pin)
delay(10);
sensorValue[4] = analogRead(5); //CdS
delay(10);
// センサー値をシリアル通信用に10bit(0〜1023)から8bitへ(0〜255)変換する
outputValue[0] = map(sensorValue[0], 0, 1023, 0, 255);
outputValue[1] = map(sensorValue[1], 0, 1023, 0, 255);
outputValue[2] = map(sensorValue[2], 0, 1023, 0, 255);
outputValue[3] = map(sensorValue[3], 0, 1023, 0, 255);
outputValue[4] = map(sensorValue[4], 0, 1023, 0, 255);
//角度値の計算
//センサー値を-1から1までの範囲にスケーリングしてsinθの値とする
float xAxisSinTheta = mapInFloat(sensorValue[3], 306, 716, -1, 1);
float yAxisSinTheta = mapInFloat(sensorValue[2], 306, 716, -1, 1);
//値を-1から1までの範囲に制限
xAxisSinTheta = constrain(xAxisSinTheta,-1,1);
yAxisSinTheta = constrain(yAxisSinTheta,-1,1);
//逆サインのラジアンを度に変換する
int xAxisTilt = float(asin(xAxisSinTheta) * 180 / PI );
int yAxisTilt = float(asin(yAxisSinTheta) * 180 / PI );
// シリアル送信
Serial.print(outputValue[0]);
Serial.print(" ");
Serial.print(outputValue[1]);
Serial.print(" ");
Serial.print(outputValue[2]);
Serial.print(" ");
Serial.print(outputValue[3]);
Serial.print(" ");
Serial.print(outputValue[4]);
Serial.print(" ");
Serial.print(xAxisTilt);
Serial.print(" ");
Serial.print(yAxisTilt);
Serial.println();
delay(50);
}
void establishContact() { // シリアル通信が確立されるまでAを送信し続ける
while (Serial.available() <= 0) {
Serial.print('A');
delay(300);
}
}
float mapInFloat(float x, float iMin, float iMax, float oMin, float oMax) {
return (x - iMin) * (oMax - oMin) / (iMax - iMin) + oMin;
}Arduinoスケッチデータのダウンロード
コンパイル、書き込みを行う。Arduinoにプログラムを書き込んだ時点ではシリアル通信がスタートしない。Maxで受信スタート後、シリアル通信がスタートする。
以下より、グラフ表示用のMaxパッチをダウンロードする。
Maxパッチデータのダウンロード
1) Maxパッチをダブルクリックして起動する。
2) オレンジのtoggleをクリックする。
3) オレンジのプルダウンリスト(右側)からusbmodem********(Arduino)を選択する。
4)シリアル通信がスタートして、 ECM、加速度センサ、CdS、回転角度の数値がグラフ表示される。

グラフ表示のスケッチと同じものを利用する。
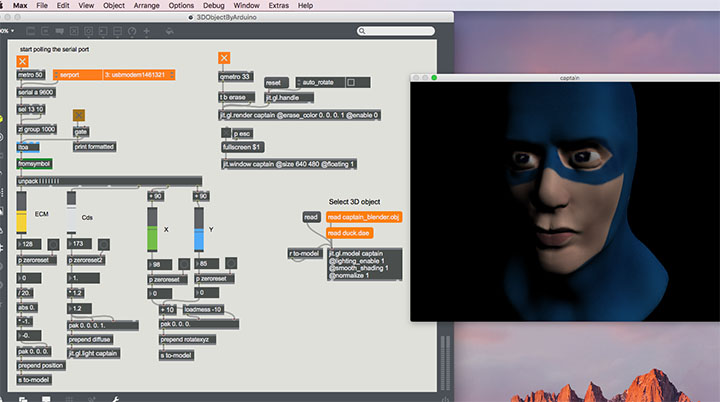
1) Maxパッチデータと3Dモデルデータを同じ階層に配置する。
2) Maxパッチをダブルクリックして起動する。
3) オレンジのtoggle(左)をクリックする。
4) オレンジのプルダウンリスト(右側)からusbmodem********(Arduino)を選択する。
5) オレンジのtoggle(右)をクリックする。
6) オレンジのメッセージボックス「read captain_blender.obj」をクリックする。
Arduinoのアクリルボードを回転させると3Dオブジェクトが回転する。ECMに息を吹きかけると3Dオブジェクトが移動する。CdS上に手をかざして暗くすると3Dオブジェクトが暗くなる。ESCキーでフルスクリーン表示切替。