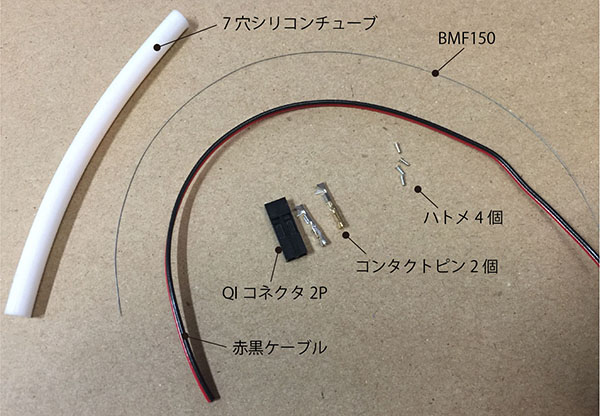
1方位屈曲アクチュエータ
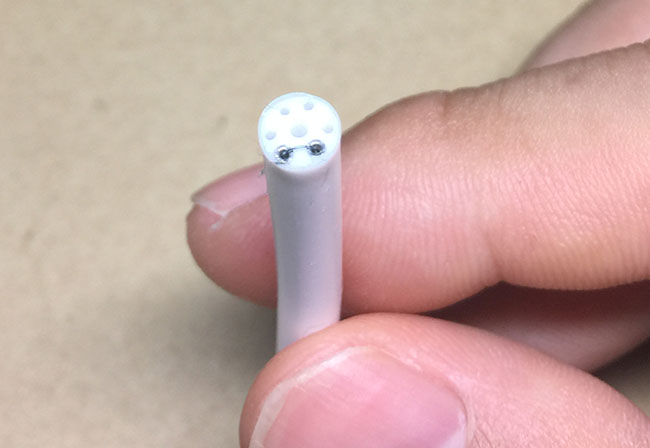
ここでは、直径5mmで1方向に屈曲する触手タイプのアクチュエータの制作方法を解説する。
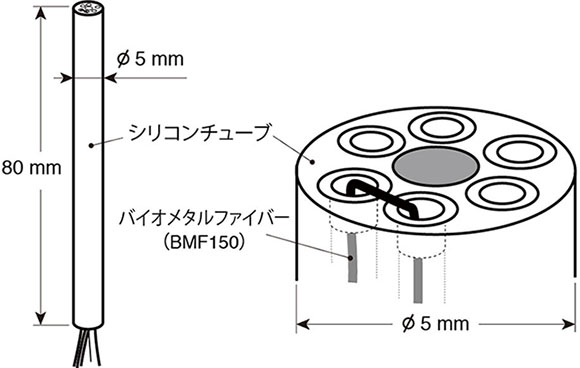
ここでは、直径5mmで1方向に屈曲する触手タイプのアクチュエータの制作方法を解説する。

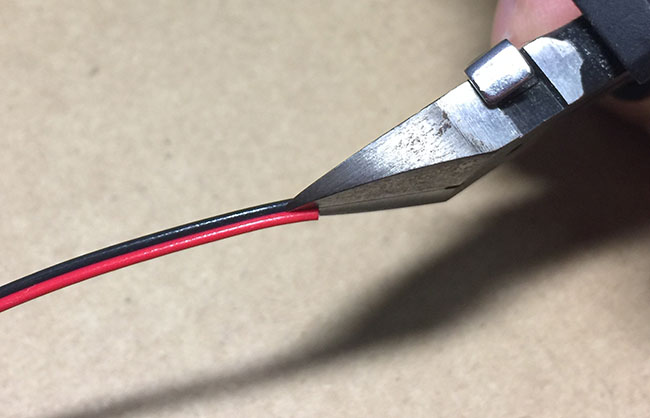
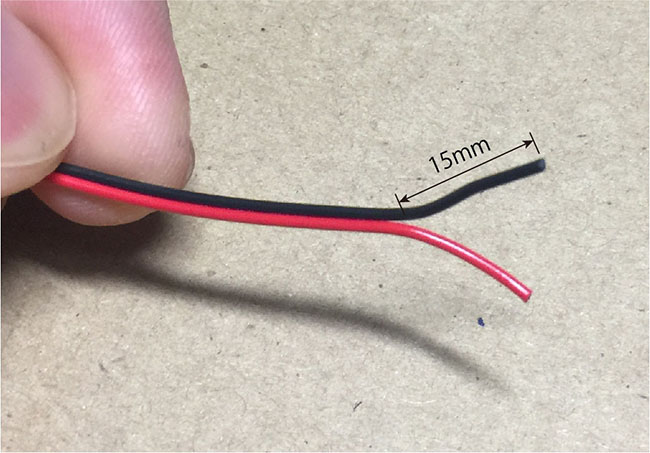
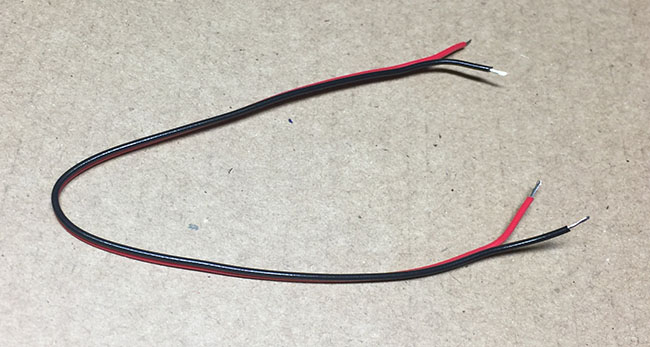
①赤黒ケーブルの先端をニッパで分割して、手で15mm程度に裂く。
②ワイヤストリッパ(AWG26の太さ)を利用して、それぞれの先端の被膜を2mm程度剥く。
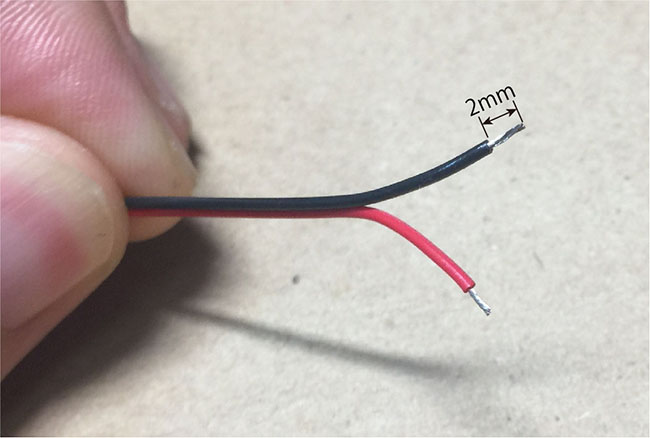
③ケーブルの反対側も同様に行う。
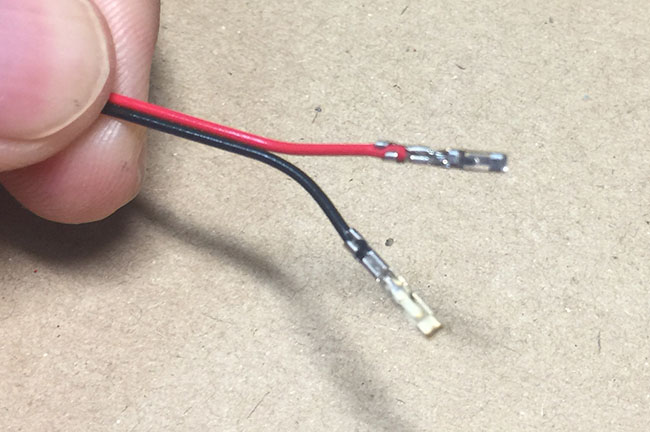
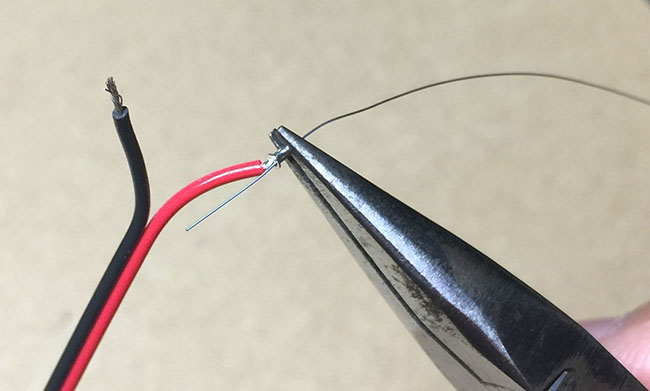
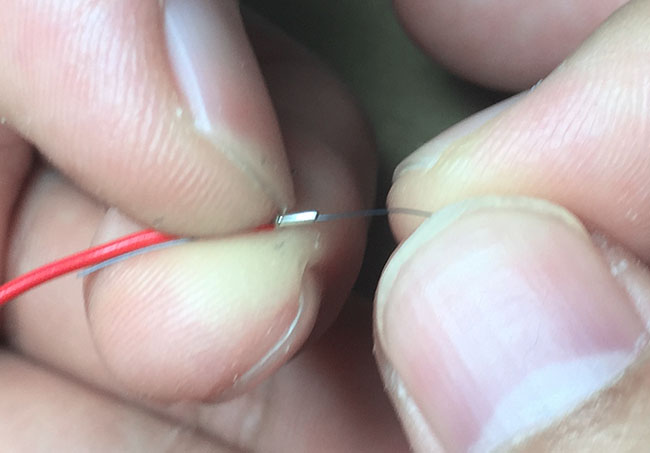
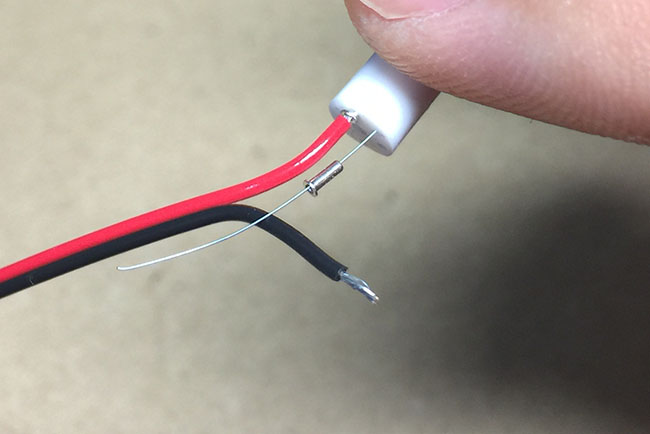
④ケーブルの片側のみ、圧着ペンチ(1.6mm)を用いてQIコネクト用のコンタクトピンを下図のように圧着する。ケーブルとコンタクトピンの向きに注意。
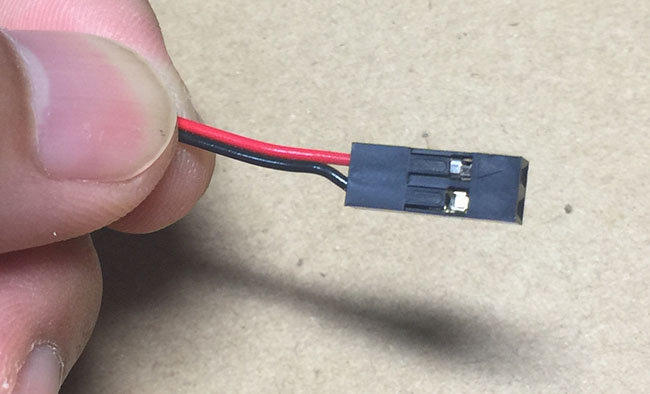
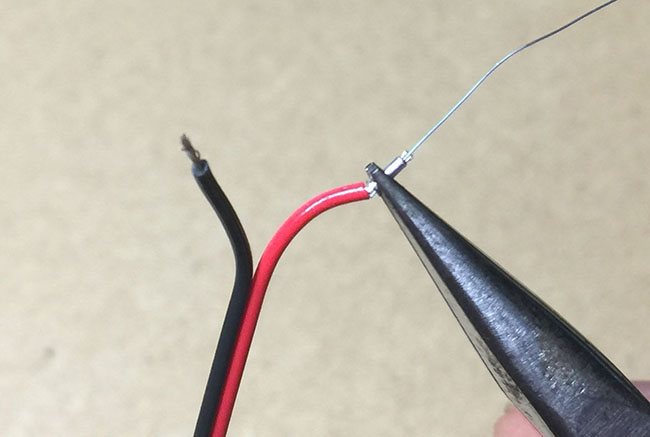
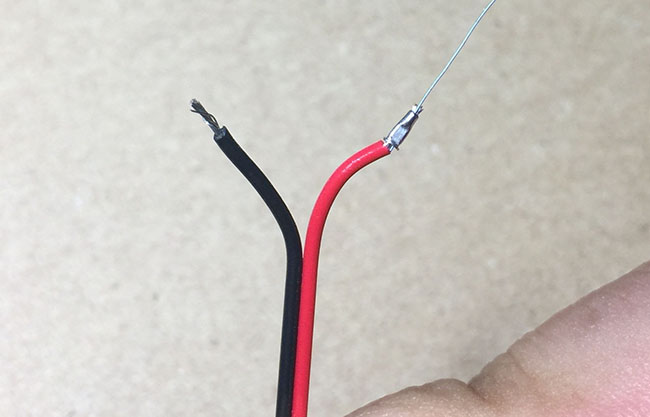
⑤QIコネクタを下図のように装着する。コンタクトピンは圧着ペンチで曲がっているとQIコネクタに入りにくいので、ペンチなどで若干整えながら行う。
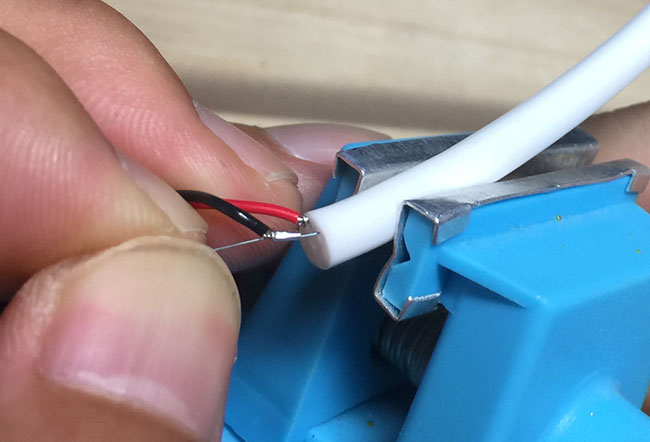
バイオメタルBMF150にハトメをつば(傘)部分が外側になるように通す。
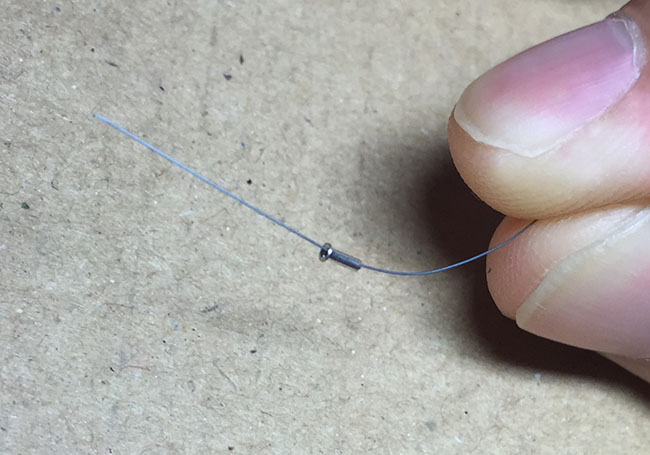
赤黒ケーブルの一方(どちらでも良い)をハトメの中に差し込む。まだ、かしめない。
BMFの先端をハトメのつばから少しだけ出るようにずらす。
つばに近い半分程度をかしめる。
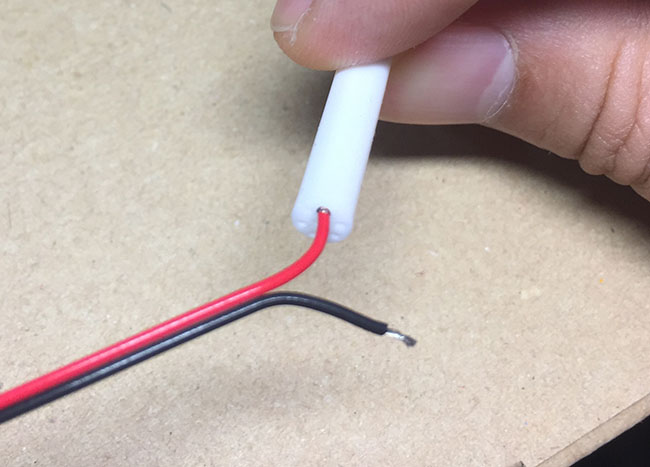
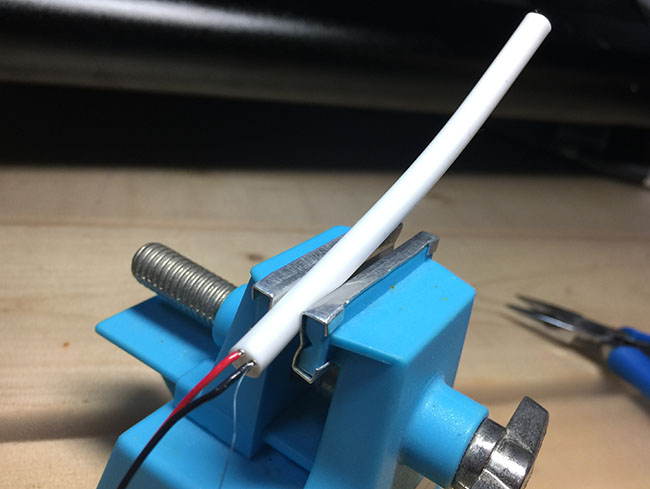
①前作業のBMFをシリコンチューブに差し込み、ハトメのつば部分がシリコンチューブの穴にかかるところまで差し込む。
②反対側にハトメ2個を下図のように差し込む。
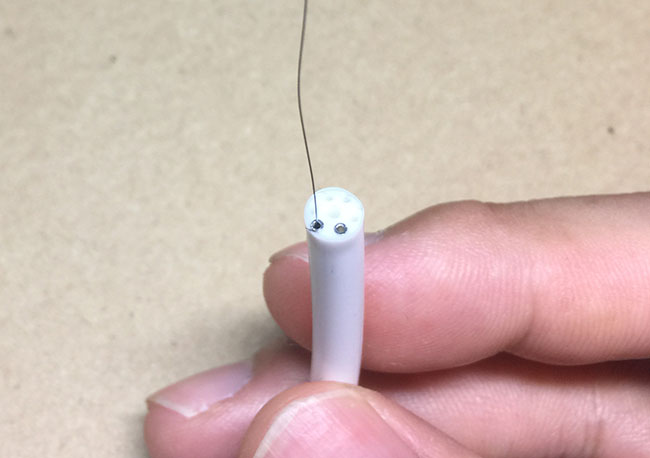
③BMFを折り返して、ハトメを差し込んだ一方の穴に入れていく。
④反対側からBMFが出てきたら引っ張る。
①つばは外側にしてハトメをBMFに通す。
②ケーブルをハトメに通して、ハトメのつば側半分程度を軽く(簡単には抜けないがずらせる程度に)かしめる。
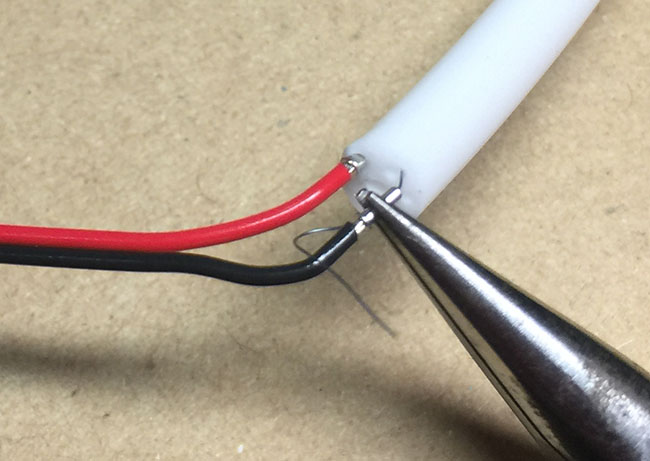
③ケーブル部分をペンチでつかみ、シリコンチューブが負荷のかかっていない状態ぎりぎりまでハトメをずらす。この時、反対の手でBMFを引っ張りながら行う。
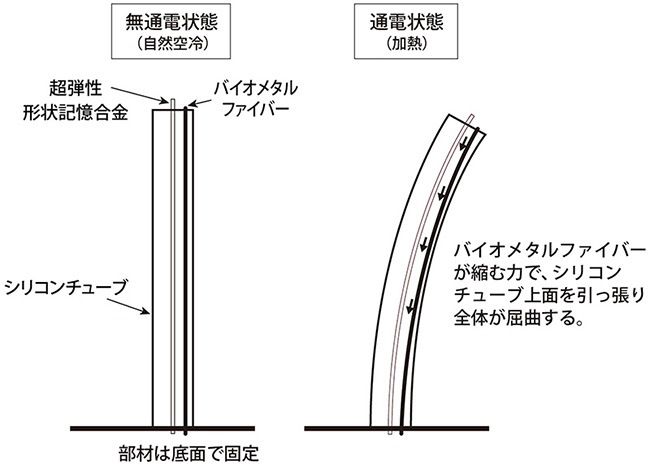
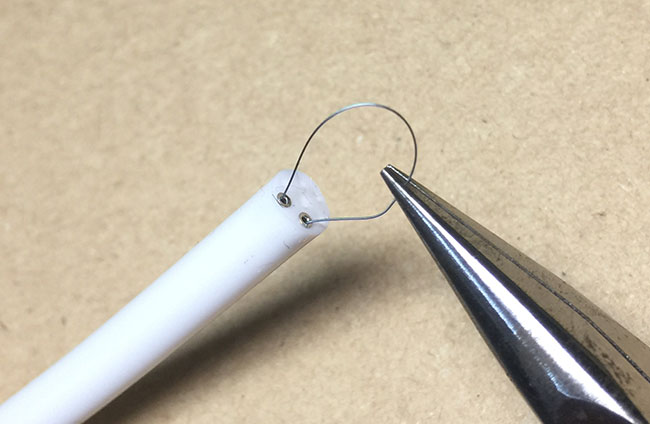
④BMFを引っ張り、ハトメの長さ程度の隙間をあける。この時のシリコンチューブは曲がった状態。
⑤前作業の隙間を維持したまま、ケーブル部分をペンチでつかんで隙間分だけずらし、ハトメの下半分を強くかしめる。

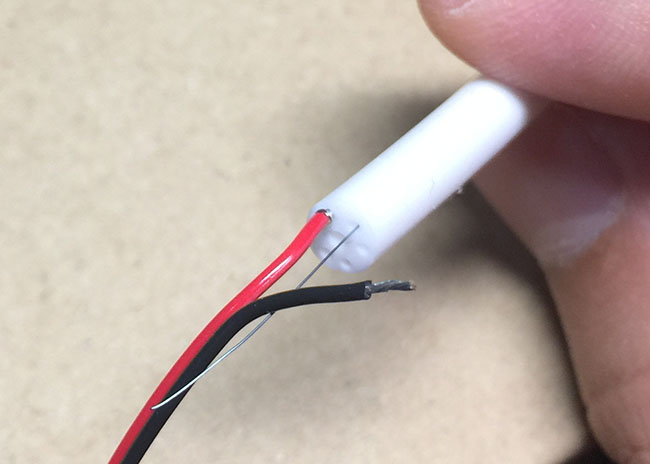
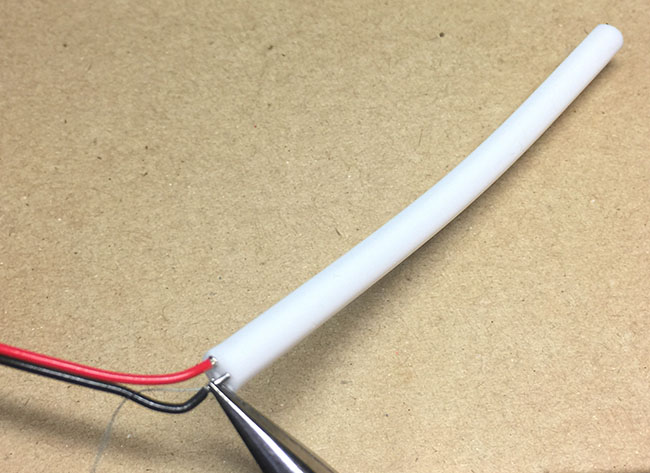
⑥ハトメをシリコンチューブの中につばが引っかかるまで差し込む。
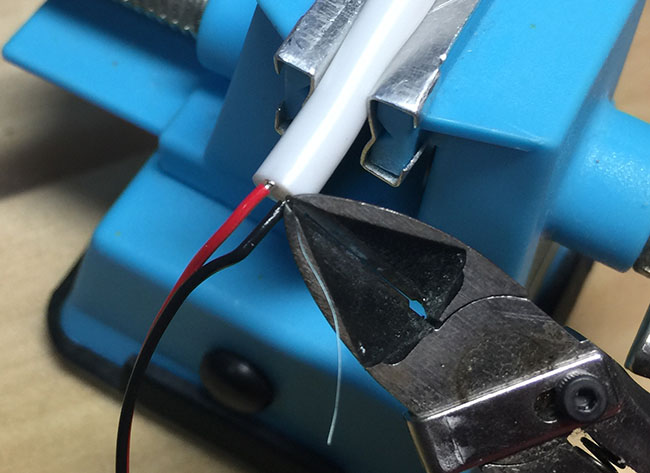
⑦余ったBMFをニッパでカットする。
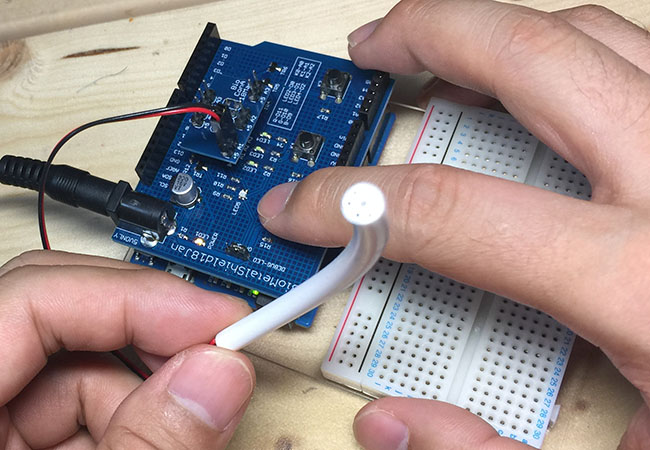
BioMetalシールドに接続コネクタを装着してケーブルを接続する。
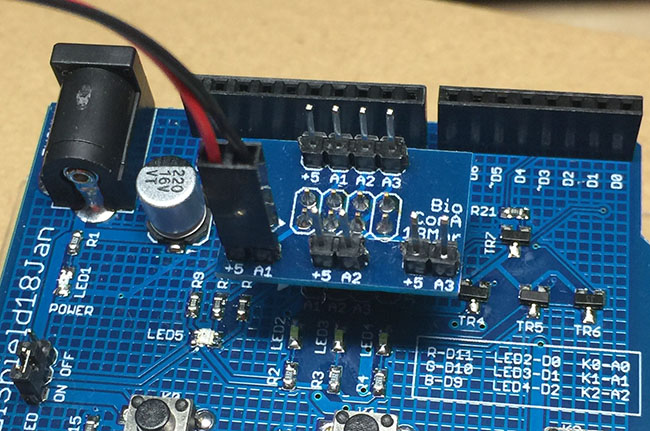
Arduinoに目的に適したスケッチをアップロードした上で動作実験を行う。